
缓存一般是基于内存的,做一次内存寻址大概需要 100ns,而做一次磁盘的查找则需要 10ms。
1. 缓存数据如何分片
一般来讲,分片算法常见的就是 Hash 分片算法和一致性 Hash 分片算法两种。
Hash 分片的算法就是对缓存的 Key 做哈希计算,然后对总的缓存节点个数取余。
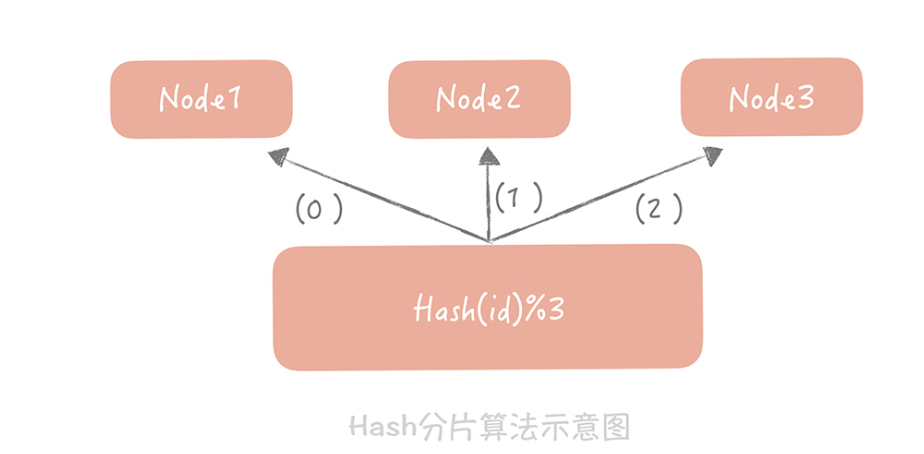
这个算法最大的优点就是简单易理解,缺点是当增加或者减少缓存节点时,缓存总的节点个数变化造成计算出来的节点发生变化,从而造成缓存失效不可用。
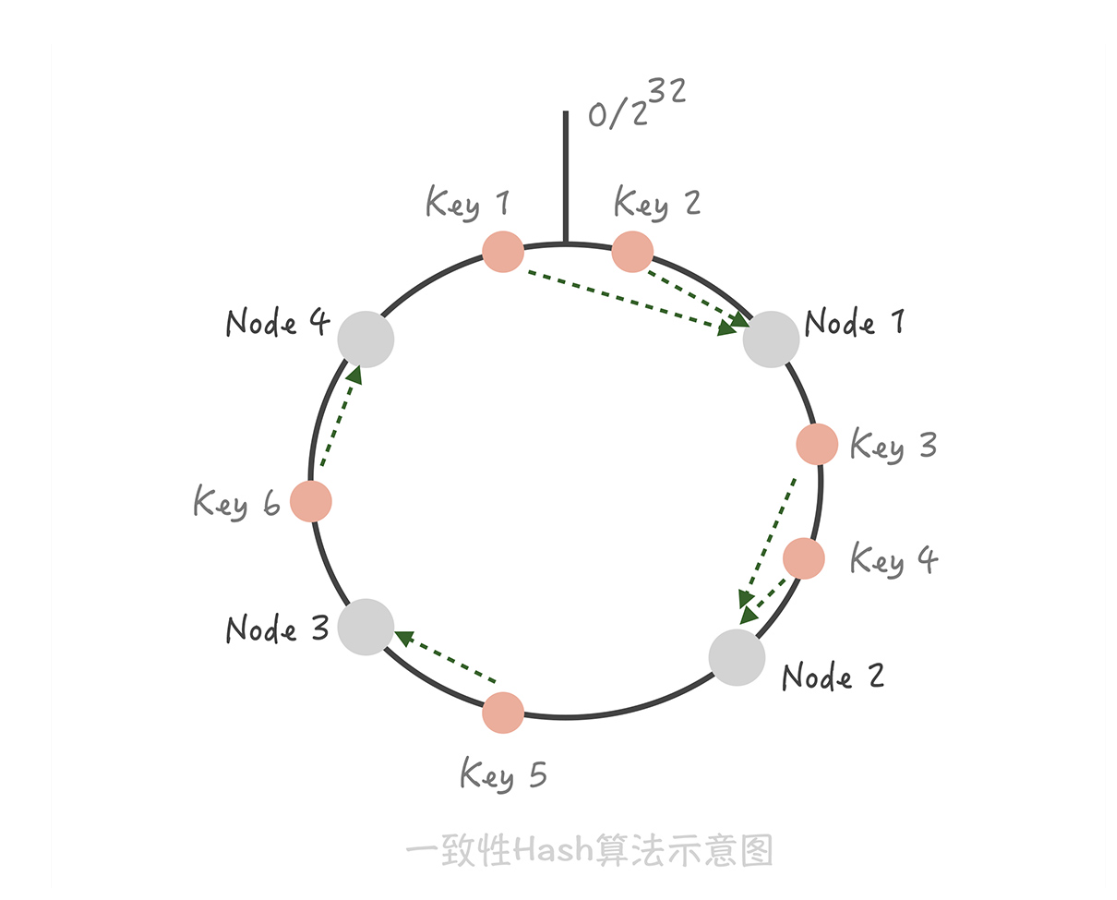
用一致性 Hash 算法可以很好地解决增加和删减节点时,命中率下降的问题。**在这个算法中,我们将整个 Hash 值空间组织成一个虚拟的圆环,然后将缓存节点的 IP 地址或者主机名做 Hash 取值后,放置在这个圆环上。当我们需要确定某一个 Key 需要存取到哪个节点上的时候,先对这个 Key 做同样的 Hash 取值,确定在环上的位置,然后按照顺时针方向在环上“行走”,遇到的第一个缓存节点就是要访问的节点。比方说下面这张图里面,Key 1 和 Key 2 会落入到 Node 1 中,Key 3、Key 4 会落入到 Node 2 中,Key 5 落入到 Node 3 中,Key 6 落入到 Node 4 中。
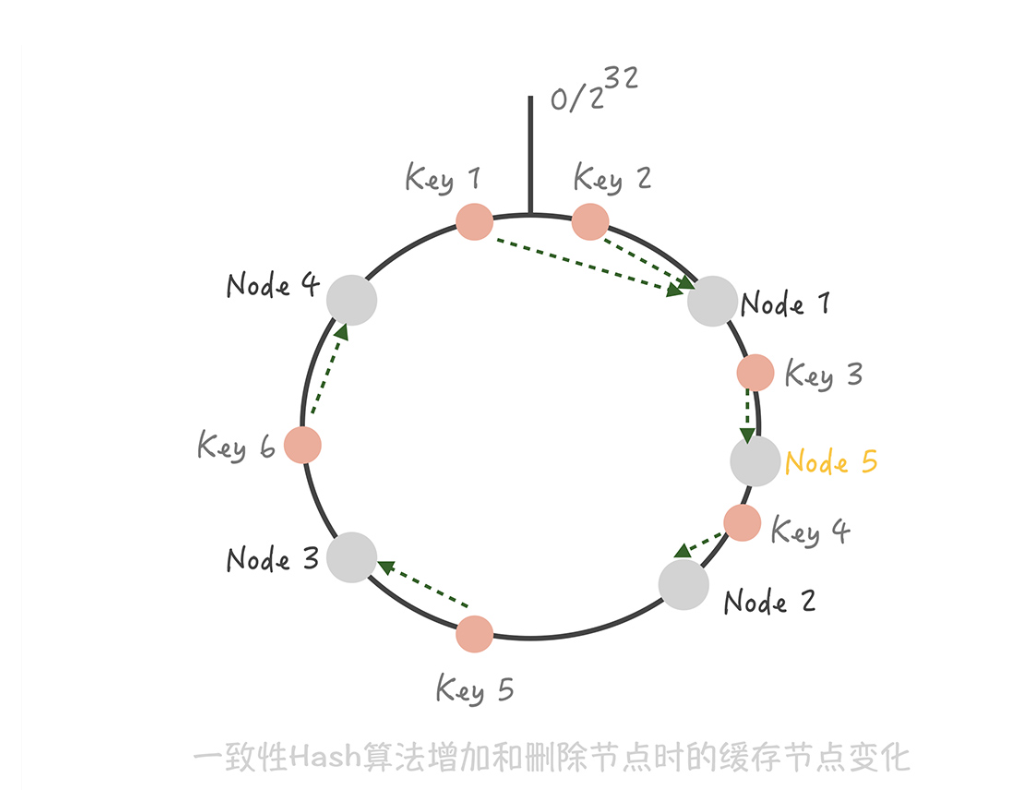
这时如果在 Node 1 和 Node 2 之间增加一个 Node 5,你可以看到原本命中 Node 2 的 Key 3 现在命中到 Node 5,而其它的 Key 都没有变化;同样的道理,如果我们把 Node 3 从集群中移除,那么只会影响到 Key 5 。所以你看,**在增加和删除节点时,只有少量的 Key 会“漂移”到其它节点上,**而大部分的 Key 命中的节点还是会保持不变,从而可以保证命中率不会大幅下降。
虽然这个算法对命中率的影响比较小,但它还是存在问题:
- 缓存节点在圆环上分布不平均,会造成部分缓存节点的压力较大;当某个节点故障时,这个节点所要承担的所有访问都会被顺移到另一个节点上,会对后面这个节点造成压力。
- 一致性 Hash 算法的脏数据问题。
极端情况下,比如一个有三个节点 A、B、C 承担整体的访问,每个节点的访问量平均,A 故障后,B 将承担双倍的压力(A 和 B 的全部请求),当 B 承担不了流量 Crash 后,C 也将因为要承担原先三倍的流量而 Crash,这就造成了整体缓存系统的雪崩。
为了解决上述问题,可以在一致性 Hash 算法中引入虚拟节点的概念。
它将一个缓存节点计算多个 Hash 值分散到圆环的不同位置,这样既实现了数据的平均,而且当某一个节点故障或者退出的时候,它原先承担的 Key 将以更加平均的方式分配到其他节点上,从而避免雪崩的发生。
其次,就是一致性 Hash 算法的脏数据问题。为什么会产生脏数据呢?**比方说,在集群中有两个节点 A 和 B,客户端初始写入一个 Key 为 k,值为 3 的缓存数据到 Cache A 中。这时如果要更新 k 的值为 4,但是缓存 A 恰好和客户端连接出现了问题,那这次写入请求会写入到 Cache B 中。接下来缓存 A 和客户端的连接恢复,当客户端要获取 k 的值时,就会获取到存在 Cache A 中的脏数据 3,而不是 Cache B 中的 4。
所以,在使用一致性 Hash 算法时一定要设置缓存的过期时间,**这样当发生漂移时,之前存储的脏数据可能已经过期,就可以减少存在脏数据的几率。
缓存穿透
少量的缓存穿透不可避免,对系统也是没有损害的,大量的穿透请求超过了后端系统的承受范围,造成了后端系统的崩溃。如果把少量的请求比作毛毛细雨,那么一旦变成倾盆大雨,引发洪水,冲倒房屋,肯定就不行了。
解决方案:回种空值以及使用布隆过滤器。
回种空值
因为空值并不是准确的业务数据,并且会占用缓存的空间,所以我们会给这个空值加一个比较短的过期时间,让空值在短时间之内能够快速过期淘汰。
回种空值虽然能够阻挡大量穿透的请求,但如果有大量获取未注册用户信息的请求,缓存内就会有有大量的空值缓存,也就会浪费缓存的存储空间,如果缓存空间被占满了,还会剔除掉一些已经被缓存的用户信息反而会造成缓存命中率的下降。
如果需要大量的缓存节点来支持,那么就无法通过通过回种空值的方式来解决,这时你可以考虑使用布隆过滤器。
使用布隆过滤器
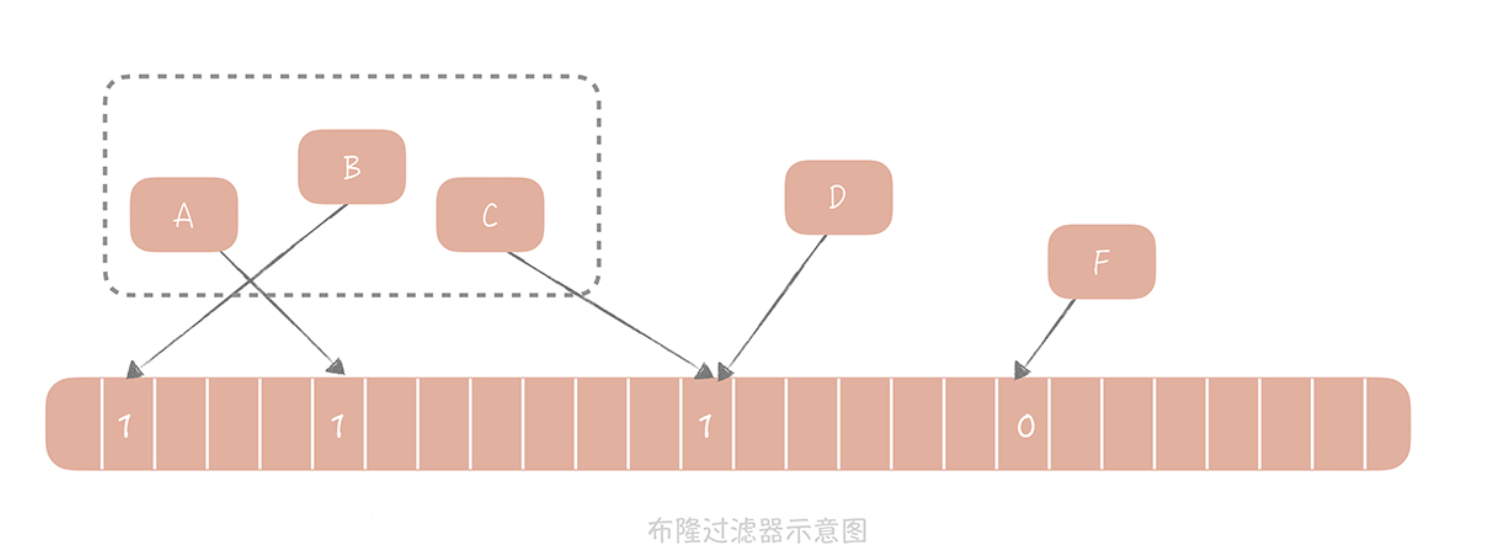
这种算法由一个二进制数组和一个 Hash 算法组成。它的基本思路如下:
我们把集合中的每一个值按照提供的 Hash 算法算出对应的 Hash 值,然后将 Hash 值对数组长度取模后得到需要计入数组的索引值,并且将数组这个位置的值从 0 改成 1。在判断一个元素是否存在于这个集合中时,你只需要将这个元素按照相同的算法计算出索引值,如果这个位置的值为 1 就认为这个元素在集合中,否则则认为不在集合中。
以存储用户信息的表为例进行讲解。首先,我们初始化一个很大的数组,比方说长度为 20 亿的数组,接下来我们选择一个 Hash 算法,然后我们将目前现有的所有用户的 ID 计算出 Hash 值并且映射到这个大数组中,映射位置的值设置为 1,其它值设置为 0。
新注册的用户除了需要写入到数据库中之外,它也需要依照同样的算法更新布隆过滤器的数组中,相应位置的值。那么当我们需要查询某一个用户的信息时,我们首先查询这个 ID 在布隆过滤器中是否存在,如果不存在就直接返回空值,而不需要继续查询数据库和缓存,这样就可以极大地减少异常查询带来的缓存穿透。
布隆过滤器拥有极高的性能,无论是写入操作还是读取操作,时间复杂度都是 O(1),是常量值。在空间上,相对于其他数据结构它也有很大的优势,比如,20 亿的数组需要 2000000000/8/1024/1024 = 238M 的空间,而如果使用数组来存储,假设每个用户 ID 占用 4 个字节的空间,那么存储 20 亿用户需要 2000000000 * 4 / 1024 / 1024 = 7600M 的空间,是布隆过滤器的 32 倍。
主要有两个缺陷:
- 它在判断元素是否在集合中时是有一定错误几率的,比如它会把不是集合中的元素判断为处在集合中;(哈希碰撞)
- 不支持删除元素。
因为误判只会造成少部分不存在的误判成已存在的,所以仍然能过滤大量的数据。
布隆过滤器虽然存在误判的情况,但是还是会减少缓存穿透的情况发生,只是我们需要尽量减少误判的几率,这样布隆过滤器的判断正确的几率更高,对缓存的穿透也更少。一个解决方案是:
使用多个 Hash 算法为元素计算出多个 Hash 值,只有所有 Hash 值对应的数组中的值都为 1 时,才会认为这个元素在集合中。
布隆过滤器不支持删除元素的缺陷也和 Hash 碰撞有关。假如两个元素 A 和 B 都是集合中的元素,它们有相同的 Hash 值,它们就会映射到数组的同一个位置。这时我们删除了 A,数组中对应位置的值也从 1 变成 0,那么在判断 B 的时候发现值是 0,也会判断 B 是不在集合中的元素,就会得到错误的结论。
怎么解决无法删除的问题?
让数组中不再只有 0 和 1 两个值,而是存储一个计数。比如如果 A 和 B 同时命中了一个数组的索引,那么这个位置的值就是 2,如果 A 被删除了就把这个值从 2 改为 1。这个方案中的数组不再存储 bit 位,而是存储数值,也就会增加空间的消耗。(并不能判断删除的是哪个,只能证明当前位置有没有值,当为0才是真正删除了)所以,你要依据业务场景来选择是否能够使用布隆过滤器,比如像是注册用户的场景下,因为用户删除的情况基本不存在,所以还是可以使用布隆过滤器来解决缓存穿透的问题的。
缓存击穿
- 在代码中,控制在某一个热点缓存项失效之后启动一个后台线程,穿透到数据库,将数据加载到缓存中,在缓存未加载之前,所有访问这个缓存的请求都不再穿透而直接返回。
- 通过在 Redis 或者其他方式中设置分布式锁,只有获取到锁的请求才能够穿透到数据库。
静态资源加速
CDN
CDN 就是将静态的资源分发到,位于多个地理位置机房中的服务器上,因此它 能很好地解决数据就近访问的问题,也就加快了静态资源的访问速度。